Hexapod

Project: Hexapod
Overview:
3D printed hexapod powered by ESP32 and MG996R servos, controlled by a PS4 controller through an open source library for ESP32. Inverse Kinematics algorithm was implemented in C++, with PCA9685 PWM motor controllers used to control the servos. Future plans include a gyroscope to dynamically balance on uneven surfaces.
Skills:
FEA, Load Analysis, Design Analysis, System Integration, C++, Circuit Analysis, Inverse Kinematics
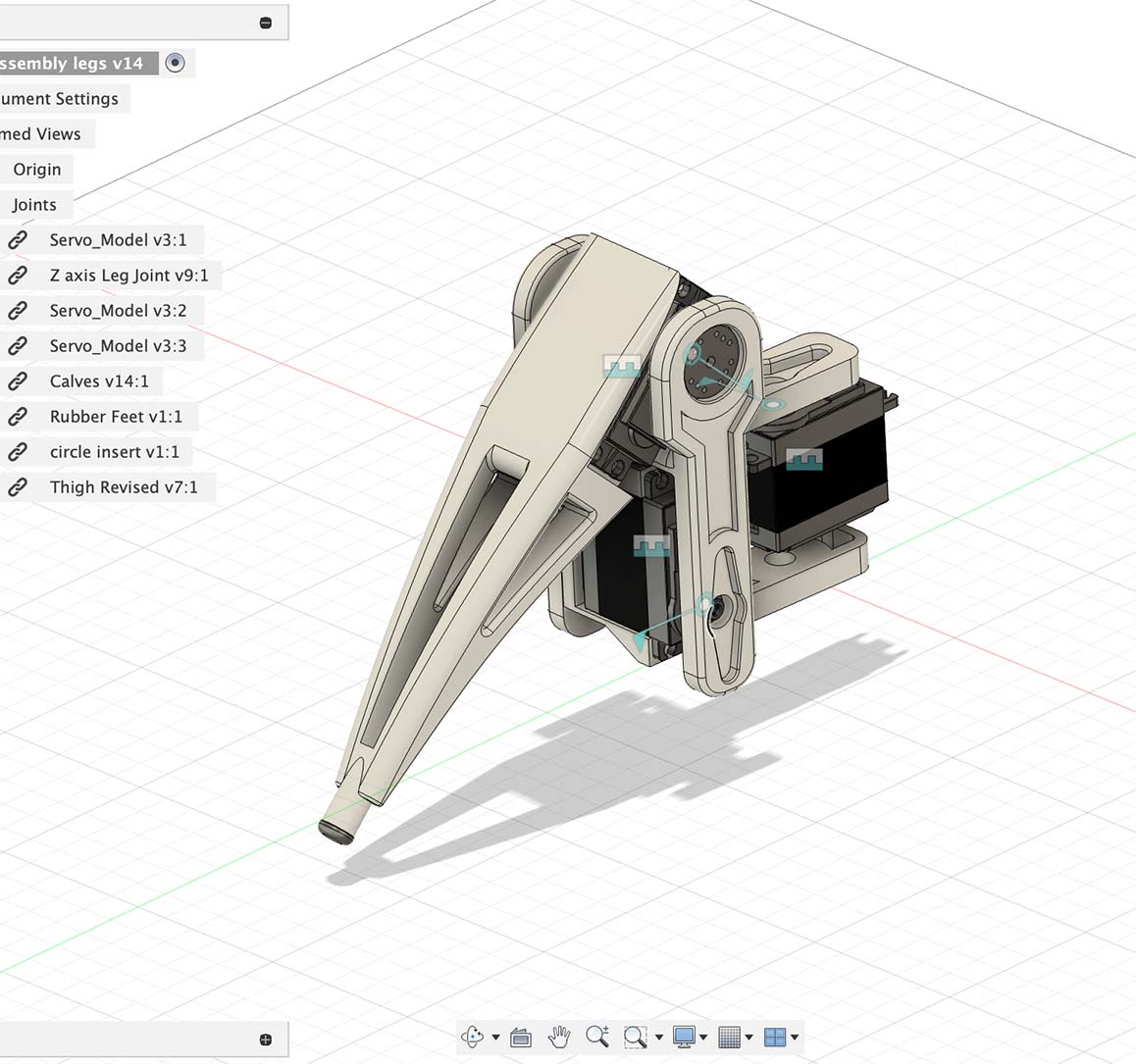
MECHANICAL DESIGN
Initial Calculations: Each MG996R servos have a torque rating of 12kg/cm, so keeping that in mind the body was designed to be minimal in weight. Printed at just 10% infill in order to keep it lightweight while keeping the design asthetic, 2 lightweight carbon fiber rods were utilized as structural support for the main body.
Topology Optimization: Forthe legs, topology optimization feature in combination with FEA analysis in Fusion360 was used to minimize weight, with each component's optimization setting at 60% of original weight.
As well as these, proper tolerance values for a transitional fit was utilized. This stage also involved measuring my 3D printer's dimensional accuracy values, therefore each attachment's tolerance values were adjusted .25mm in the x direction and -0.1mm in the y direction accordingly.
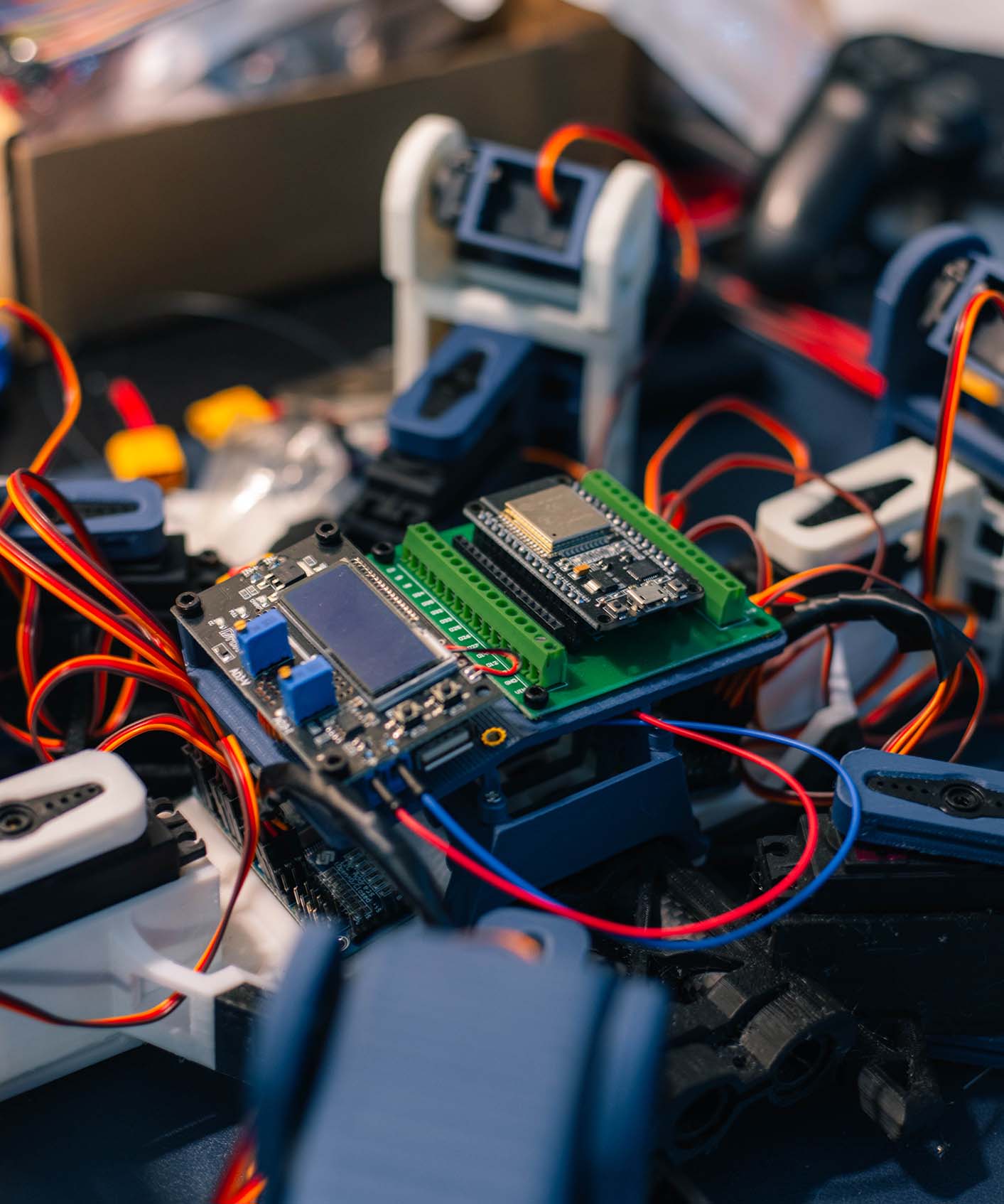
HARDWARE CONFIGURATION
Each Servo used has a voltage rating of 6v, with max current at stall being 2.4A. In order to supply a constant voltage for all 18 servos, a 3S lipo battery was utilized with a DC buck converter to step the voltage down from 11.6v to 5.5V, as well as setting a max current rating of 5A to ensure that the PCA9685 servo drivers are protected.
ESP32 was used for it's built in bluetooth connectivity which I am using to pair it to my PS4 controller for inputs. With the 3S battery's voltage being 11.6V, I can wire it directly to the ESP32 without needing to step down the voltage again.
All the hardware components are mounted directly in the center of the bot as to keep the balance.
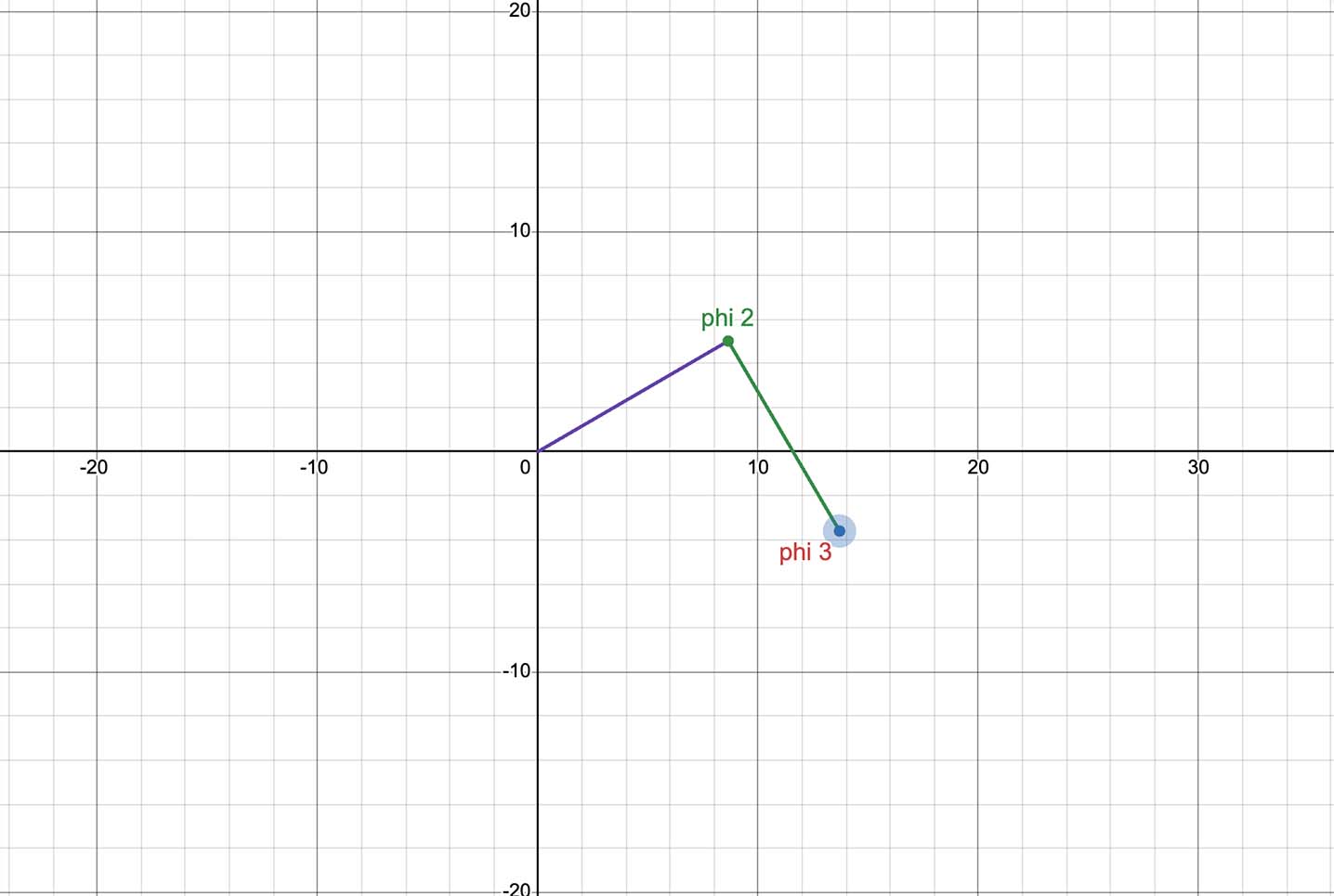
INVERSE KINEMATICS
In regards to the Inverse Kinematics algorithm, each leg utilizes the same formula within it's local coordinates, which are then unified with global coordinates with repect to the Hexapod's center.
Utilizing PlatformIO over Arduino IDE for firmware development was a superior choice as it made it easier to follow a more traditional C++ programming environment, as well as being able to utilize trusted libraries for PS4 controller input and output.